La technologie
Au service
De la
Réalité
Pensée et fabriquée en France
Navettes autonomes et plateforme intelligente pour des mobilités durables, inclusives et souveraines.

Pensée et fabriquée en France
Navettes autonomes et plateforme intelligente pour des mobilités durables, inclusives et souveraines.
Navettes autonomes
Une automatisation
100% agnostique



Capteurs
Calculateur

Robotisation

Robotisation
Caractéristiques techniques
Niveau 4 d’automatisation
(Sans opérateur à bord)
Vitesse en mode autonome
jusqu’à 90 km/h
Autonomie: 330 kilomètres
100% electrique
Tout type de route
pentes jusu’à 18 %
Pas de ligne
dédiée
Conduite en mode manuel
(jusqu’à 130 km/h)
Supervision et lancement
de missions à distance
Climatisation
Porte latérale coulissante
automatisée
Application mobile
utilisateur (dispatch)
capacités
Perception &
localisation
Conditions météo
Jour
Neige
Nuit
Brouillard
(50m)
Pluie
Vent
Détection d’objets
Capacité à anticiper le comportement jusqu’à 200 m de distance
2 roues
Piétons
Autres véhicule


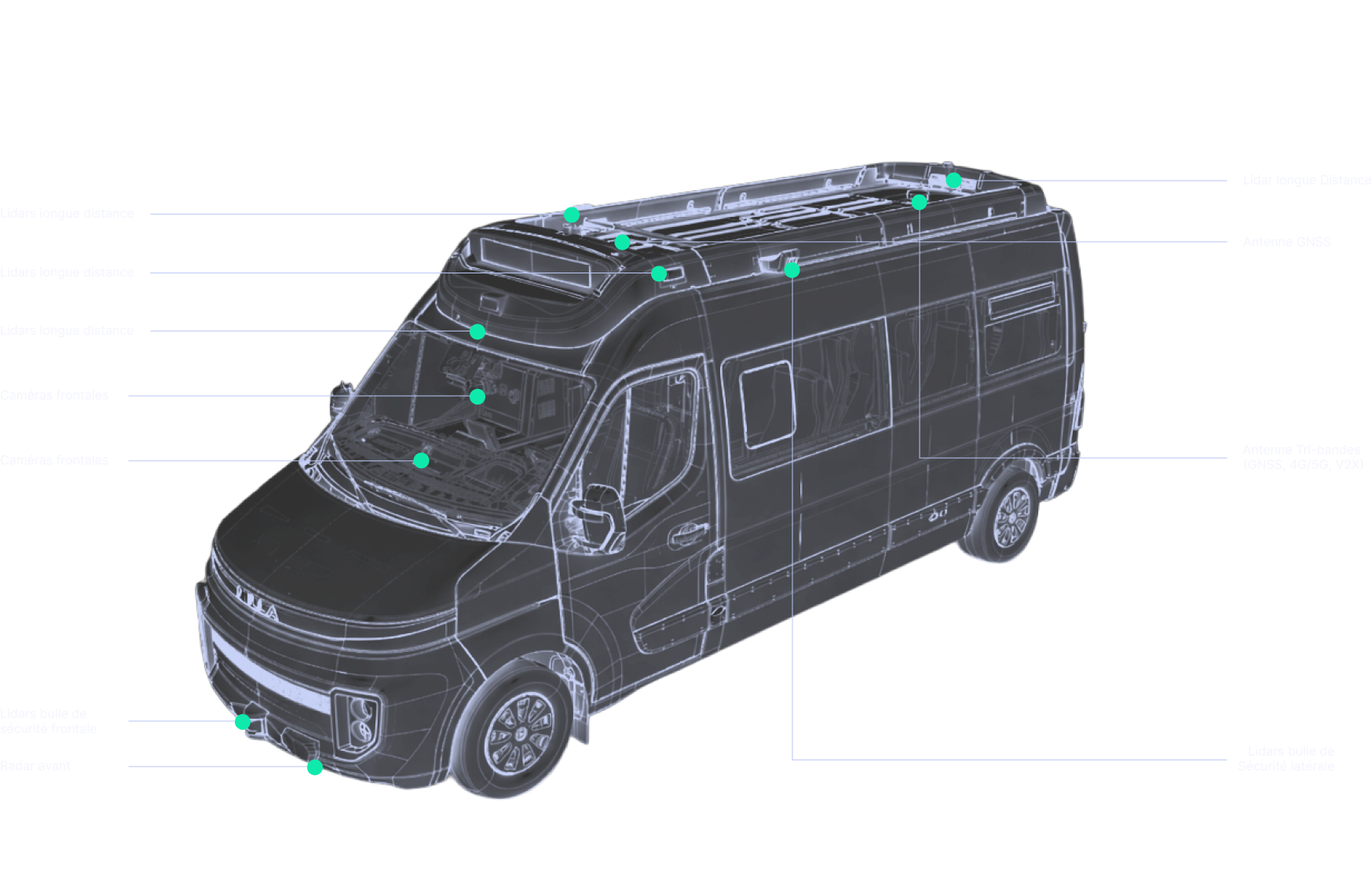
Capteurs intelligents
13 capteurs intelligents
au service de l’autonomie
et de la sécurité


Cartographie &
géolocalisation
Le système GNSS fournit la position géographique de la navette.
Cette information est combinée à d’autres capteurs et à une cartographie de haute précision afin de localiser la navette avec exactitude sur les routes et zones autorisées à la circulation autonome.
Grâce à cette cartographie précise, la navette :
- se localise de manière fiable sur son itinéraire,
- connaît les limites de son domaine opérationnel,
- circule uniquement sur des axes préalablement validés.
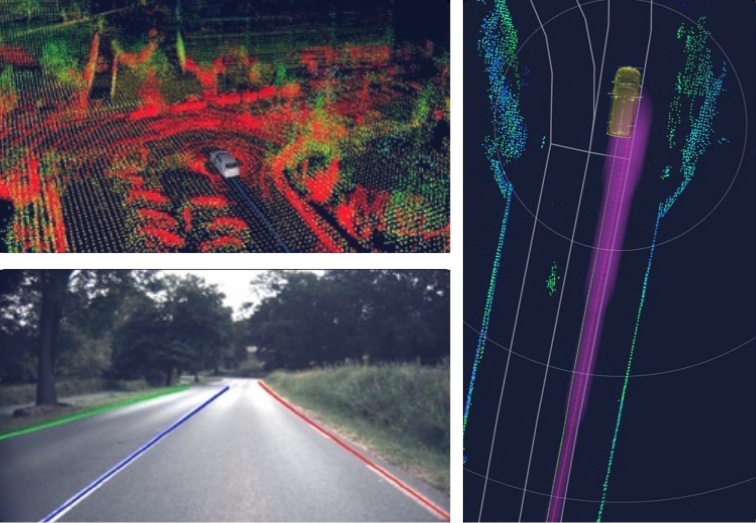
Détection par
Fusion des capteurs
Aucun capteur n’est parfaitement fiable dans toutes les situations.
En combinant les informations issues des caméras, du LiDAR, du
radar et du GNSS, la navette autonome :
- Comprend mieux son environnement,
- Reste fonctionnelle même si un capteur est temporairement dégradé,
- Prend des décisions plus sûres pour les passagers, les piétons et les autres usagers de la route.
C’est cette complémentarité des capteurs qui permet à la navette autonome de circuler en toute sécurité.
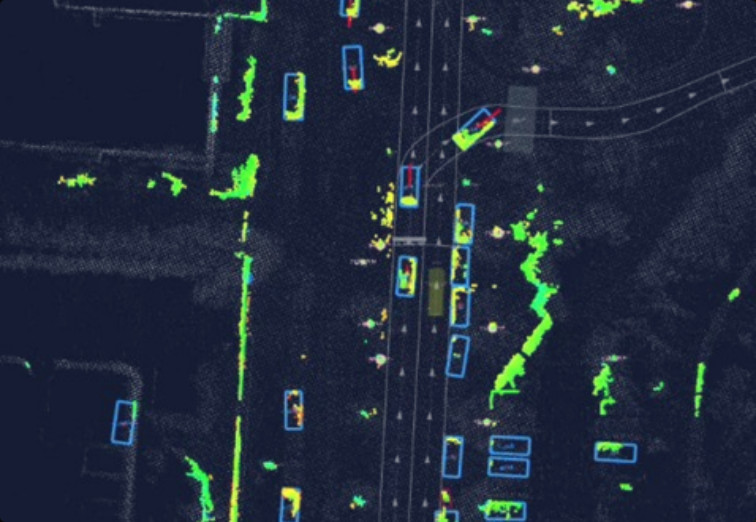
Intelligence
Artificielle
Nous combinons intelligence artificielle et approche déterministe pour détecter avec fiabilité les piétons, les véhicules et les obstacles autour de la navette.
L’intelligence artificielle joue un rôle
central dans la perception de l’environnement.
Elle permet d’analyser en continu de grandes quantités de données issues des caméras et du LiDAR afin d’identifier les objets, de distinguer les différents usagers de la route et de comprendre la scène de circulation dans son ensemble.
Cette capacité d’analyse avancée est essentielle pour faire face à la diversité et à la complexité des situations rencontrées sur la route.
À l’image des technologies de conduite autonome les plus avancées, l’IA permet à la navette de reconnaître rapidement son environnement et d’adapter son comportement en temps réel. Elle apporte une perception riche et détaillée, difficile à atteindre avec des méthodes traditionnelles seules.
Cette intelligence artificielle est intégrée dans une approche déterministe, conçue pour encadrer son fonctionnement.
Les algorithmes sont maîtrisés, validés et configurés pour produire des résultats cohérents, avec des temps de réponse prévisibles.
Cette combinaison permet d’optimiser les performances de détection tout en garantissant un comportement fiable, stable et compréhensible du système, condition essentielle pour assurer la sécurité des passagers et des autres usagers de la route.
Prédiction
des mouvements
À partir des informations fournies par les capteurs, la navette estime les mouvements possibles des usagers autour d’elle, tels que les véhicules ou les piétons.
Cette étape permet d’anticiper les situations de circulation et de mieux comprendre l’évolution de l’environnement à court terme.
Planification
de la trajectoire
En tenant compte de ces prédictions, de la cartographie précise et des règles de circulation, la navette calcule une trajectoire sûre et adaptée à la situation.
La planification vise à garantir une conduite fluide, confortable et respectueuse de l’environnement routier, tout en restant dans les zones autorisées.

Contrôle
du véhicule
- Le système de contrôle transforme la trajectoire planifiée en commandes précises pour le véhicule, telles que l’accélération, le freinage et la direction.
- Ces commandes sont appliquées de manière progressive et maîtrisée, afin d’assurer la stabilité du véhicule et le confort des passagers.
- Grâce à cette approche, la navette est capable d’évoluer de façon prévisible et sécurisée dans son environnement, tout en s’adaptant aux situations rencontrées.


La navette autonome anticipe son environnement et adapte sa conduite grâce à des fonctions de prédiction, de planification et de contrôle.


Bulle de
Sécurité
La bulle de sécurité est un système conçu pour protéger la navette en déclenchant automatiquement un freinage d’urgence si un obstacle dangereux est détecté.
La bulle de sécurité est assurée par une fonction indépendante du module de perception de la navette.
Elle agit rapidement (latence faible), même face à des objets de petite taille, non identifiés ou très proches de la navette.
Pour décider si un freinage d’urgence est nécessaire, la bulle de sécurité réalise plusieurs opérations :

- Elle anticipe la trajectoire du véhicule.
Le système estime la trajectoire que la navette va réellement suivre en tenant compte de :
- La trajectoire théorique prévue,
- La position actuelle du véhicule.
- Elle crée une zone protégée autour de la navette
Autour de cette trajectoire estimée :
- le système génère une zone de sécurité, appelée “bulle de sécurité”.
- S’il détecte un obstacle dans cette bulle, il évalue immédiatement le risque de collision.
- Elle surveille la vitesse des objets proches
La bulle de sécurité ne se contente pas de repérer les objets :
elle mesure ou estime aussi leur vitesse.
- Détecter les risques de collision même si un objet se déplace et entre dans la bulle.
- Prendre les mesures nécessaires pour éviter ou réduire l’impact de la collision
Cyber
sécurite
Une cybersécurité intégrée dès la conception
La cybersécurité est un élément essentiel de la navette autonome.
Elle est intégrée dès la conception du système afin de protéger le véhicule, les passagers et les données contre les menaces numériques.
La navette est développée conformément aux normes internationales de cybersécurité automobile ( (ISO 21434, UN R155 / R156), qui définissent les bonnes pratiques pour sécuriser les systèmes embarqués et les communications.
Protection des systèmes embarqués
Les systèmes informatiques de la navette sont protégés par plusieurs niveaux de sécurité.
Les accès sont strictement contrôlés et les fonctions critiques sont isolées des fonctions non essentielles afin de limiter les risques d’intrusion ou de propagation d’un incident.
Des mécanismes de sécurité sont mis en place pour garantir l’intégrité des logiciels embarqués, notamment lors du démarrage et des mises à jour du système.
Communications sécurisées
Les échanges de données, qu’ils aient lieu à l’intérieur de la navette ou avec des systèmes externes, sont protégés par des mécanismes de communication sécurisée.
Cela permet de garantir que seules des entités autorisées peuvent échanger des informations avec le véhicule.
Mise à jour et surveillance continues
La navette bénéficie de procédures de mise à jour sécurisées, permettant d’intégrer des améliorations ou des correctifs de sécurité de manière contrôlée.
Des mécanismes de surveillance permettent également de détecter et de réagir rapidement à des événements anormaux.

La Manœuvre
à Risque Minimal
(MRM)
La sécurité est au cœur du fonctionnement de la navette autonome.
Lorsqu’une situation inhabituelle est détectée, la navette est conçue pour adopter un comportement sûr grâce à ce que l’on appelle une Manœuvre à Risque Minimal (MRM).
La MRM est une action automatique mise en œuvre lorsque le système détecte une anomalie, une dégradation de ses capacités ou une situation qui ne lui permet plus de fonctionner normalement.

La navette peut déclencher une MRM dans différentes situations, par exemple :
- En cas de défaillance d’un capteur,
- Lors d’un problème technique,
- Si les conditions de circulation sortent du domaine d’utilisation autorisé,
- Si le système ne peut plus garantir un niveau de sécurité suffisant.
Selon la situation et l’environnement, cela peut inclure :
- Un ralentissement progressif,
- Un arrêt contrôlé dans une zone sûre,
- La mise en sécurité du véhicule,
- L’activation de signaux d’avertissement.
Ces actions sont réalisées de manière automatique et maîtrisée, afin de garantir une transition sûre vers un état sécurisé.